單車自動駕駛短期內難普及,車聯網協同或是破局關鍵——訪北京車網科技孫寧

隨著人工智能與傳感器技術的飛速發展,自動駕駛已成為全球汽車產業競爭的焦點。近期北京車網科技有限公司的技術專家孫寧在接受采訪時指出,依賴單一車輛的、高度自主的“單車智能”自動駕駛模式,在短時間內難以實現規模化、規范化的安全應用。這一觀點引發了行業對自動駕駛落地路徑的重新思考。
孫寧分析認為,當前主流的單車自動駕駛方案主要面臨三大核心挑戰。首先是感知局限。無論傳感器如何精密,單車視角始終存在盲區,對于突如其來的障礙物、被遮擋的交通參與者或極端天氣下的路況,系統難以做到100%可靠識別。其次是決策困境。在復雜的城市道路環境中,尤其是在人車混行、規則與情理交織的場景下,讓AI系統像人類駕駛員一樣進行模糊判斷和預判性交互,目前技術尚不成熟,倫理與責任界定也異常復雜。最后是高成本制約。為實現高階自動駕駛而搭載的激光雷達、高性能計算平臺等設備,導致車輛造價高昂,難以向大眾市場普及。
“將自動駕駛的全部責任與能力壓在一輛車上,不僅技術難度大,社會成本也極高。”孫寧強調。在他看來,突破瓶頸的關鍵可能在于從“單車智能”轉向“車路云網一體化”的協同智能。這正是北京車網科技等企業重點布局的方向。
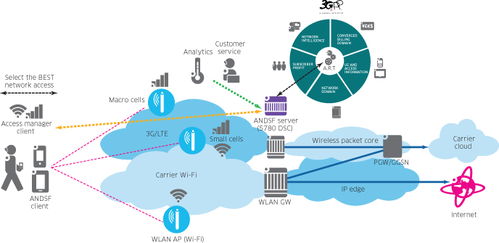
所謂協同智能,即通過先進的無線通信網絡技術(如5G、C-V2X),將車輛與道路基礎設施(如交通信號燈、路側感知單元)、其他車輛以及云端管控平臺連接起來,實現信息實時共享與協同決策。例如,路側傳感器可以將其廣角視野信息發送給臨近車輛,提前預警拐角處的行人;云端平臺可以基于全局交通流量,為區域內的自動駕駛車輛規劃最優通行序列,提升整體效率。
孫寧表示,網絡技術開發在這一體系中扮演著“神經系統”的角色。穩定、超低延時、高可靠的通信是實現車、路、云實時交互的基石。北京車網科技正致力于車聯網通信協議、邊緣計算平臺以及網絡安全等核心技術的研發,旨在構建一個高效、安全的協同感知與決策網絡。這種模式能夠有效彌補單車感知的不足,降低對車載硬件的極端依賴,從而有望以更合理的成本,更早地實現安全可控的自動駕駛規模化應用。
車路協同路徑也面臨基礎設施建設投入大、標準統一、跨部門協調等挑戰。但孫寧認為,與攻克完全的單車智能相比,這是一條更符合技術發展規律與中國市場特色的務實路徑。他預測,在未來相當長一段時間內,自動駕駛將呈現“協同智能為主、特定場景先行”的發展態勢。例如在高速公路、園區、港口等封閉或結構化道路中,車聯網賦能的自動駕駛將率先實現規范化商用,而面對全域全場景的完全無人駕駛,仍需更長時間的技術積累與生態構建。
孫寧的觀點為行業提供了冷靜的思考。自動駕駛的終極愿景雖未改變,但抵達路徑可能需要更多的協同與智慧。從追求單車的“極致智能”,到構建系統的“協同生態”,通過先進的網絡技術將交通要素聯成一體,或許是推動自動駕駛從實驗室Demo走向規范化、規模化社會應用的加速器。
如若轉載,請注明出處:http://www.vjeyu.cn/product/44.html
更新時間:2026-01-06 16:29:36